
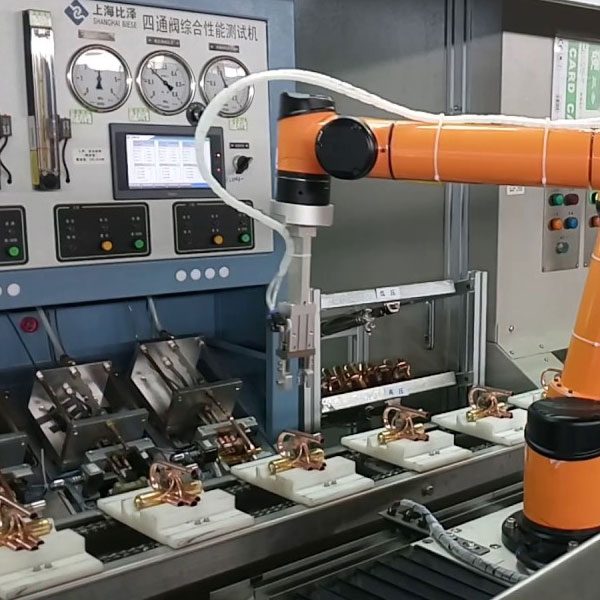
Bin picking neboli vybírání ze zásobníků či košů (označované také jako náhodné vybírání ze zásobníků) je klíčovým problémem počítačového vidění a robotiky. Cílem je, aby průmyslový nebo kolaborativní robot (kobot) s připojenými senzory a kamerami vybral z koše výrobky či díly s náhodnou polohou pomocí některého typu uchopovače (pneumatického, dvouprstého, tříprstého, adhezivního či jakéhokoli jiného) a dokázal je zvednout bez poškození daného dílu či produktu nebo ostatních v jeho okolí.
Dřívější řešení pro vybírání ze zásobníků využívala fotometrickou stereometrii při obnovování tvarů objektů a určování jejich orientace v prostoru. Dnes roboty, vedeny výkonným systémem 3D vidění (za využití špičkových kamer a průmyslových objektivů), dokáží rozpoznat náhodně naskládané výrobky či díly, a to dokonce i ty s tmavým nebo reflexním povrchem či složitou strukturou, a poté je přesně vyzvednout z hlubokých zásobníků či košů, aniž by došlo k jakékoli nehodě.
Příkladem nového typu řešení je bin picking systém Popelka od společnosti Kinali.









 +420 778 037 847
+420 778 037 847 info@aubo.cz
info@aubo.cz